Alışveriş Sepeti
Sepetinizde ürün bulunmamaktadır.





Bu motor sürücü kalkanı ve buna karşılık gelen Arduino kütüphanesi, bir çift çift yönlü, fırçalı DC motoru Arduino veya A-Star 32U4 Prime gibi uyumlu bir kartla kontrol etmeyi kolaylaştırır . Kart, 6 V ila 32 V arasında çalışan Allegro'nun A4990 çift H köprülü motor sürücü IC'sine sahiptir. Her motor kanalına sürekli 0,65 A verebilir ve A4990'ın akım kontrol özelliği, tepe motor akımını yerleşik algılama dirençleriyle kanal başına yaklaşık 0,9 A ile sınırlar ve bu kalkanı düşük akımlı, yüksek voltajlı motorlar için oldukça uygun hale getirir.
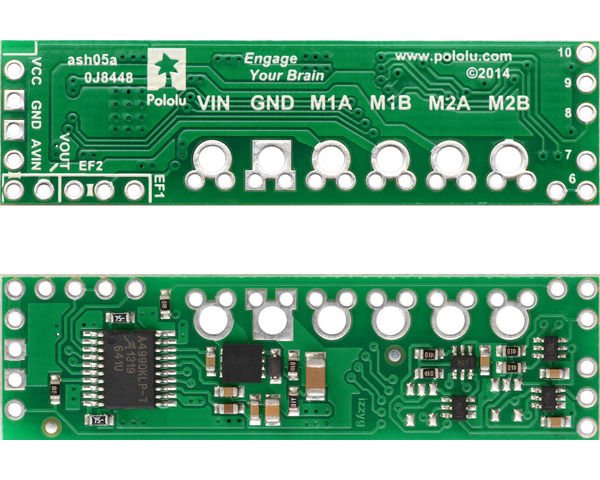
Kalkan, A4990 sürücüsü ve ters pil koruması için bir FET de dahil olmak üzere SMD bileşenleriyle tamamen doldurulmuş olarak gönderilir; Arduino ile arayüz oluşturmak için başlık pimleri ve motorları ve gücü bağlamak için terminal blokları dahildir ancak lehimlenmemiştir ( aşağıdaki Donanımla montaj bölümüne bakın).
|
|
Kalkan, tanılama ve kontrol hatları için dijital pinler 6, 7, 8, 9 ve 10'u kullanır. Standart bir Arduino pin düzenlemesi ve pinler 9 ve 10'da PWM sinyalleri üretme yeteneği olan herhangi bir kartla uyumlu olmalıdır. Uyumlu kontrol kartları şunları içerir:
Bu kalkan, Arduino'lar için düşük maliyetli, temel bir motor sürücü seçeneği sağlamayı amaçlamaktadır, bu nedenle tipik Arduino kalkanlarından çok daha küçüktür ve geçişli, istiflenebilir başlıklar içermez . Daha fazla yapılandırma seçeneğine sahip daha yüksek güçlü sürücüler için daha büyük MC33926 ve VNH5019 motor sürücü kalkanlarımıza bakın .
Bu kalkanın daha yüksek akımlı alternatifleri için lütfen çift MAX14870 motor sürücü kalkanını veya DRV8835 çift motor sürücü kalkanını düşünün. Ayrıca Arduino dışında bir şey kullananlar veya daha dar alan kısıtlamaları olanlar için daha küçük bir A4990 taşıyıcımız da var .
 |
|
Arduino için Pololu A4990 Çift Motor Sürücü Kalkanı, üst ve alt taraflar. |
|---|
Kalkan Arduino'nuza takılmadan önce, başlık pimleri uygun deliklere lehimlenerek kartın altına (tüm yüzeye monte bileşenlerin olduğu taraf) monte edilmelidir. Kalkan, daha küçük parçalara bölünebilen ve bu amaçla kullanılabilen 15 pimli 0,1 inç düz kopmalı erkek başlık şeridiyle birlikte gelir . Kartın sol tarafındaki dört delik (VCC, GND, GND ve AVIN) ve kartın sağ tarafındaki beş delik (dijital pimler 6 - 10), kalkanın Arduino'ya uygun bağlantıları yapabilmesi için erkek başlık pimleriyle birleştirilmelidir. Birleştirildikten sonra, kalkanı Arduino'ya düzgün bir şekilde taktığınızdan emin olmanın kolay bir yolu, kalkandaki 7 ve 8 numaralı pimler arasındaki boşluğu Arduino'nun dişi başlıklarındaki 7 ve 8 numaralı pimler arasındaki boşlukla hizalamaktır.
|
|
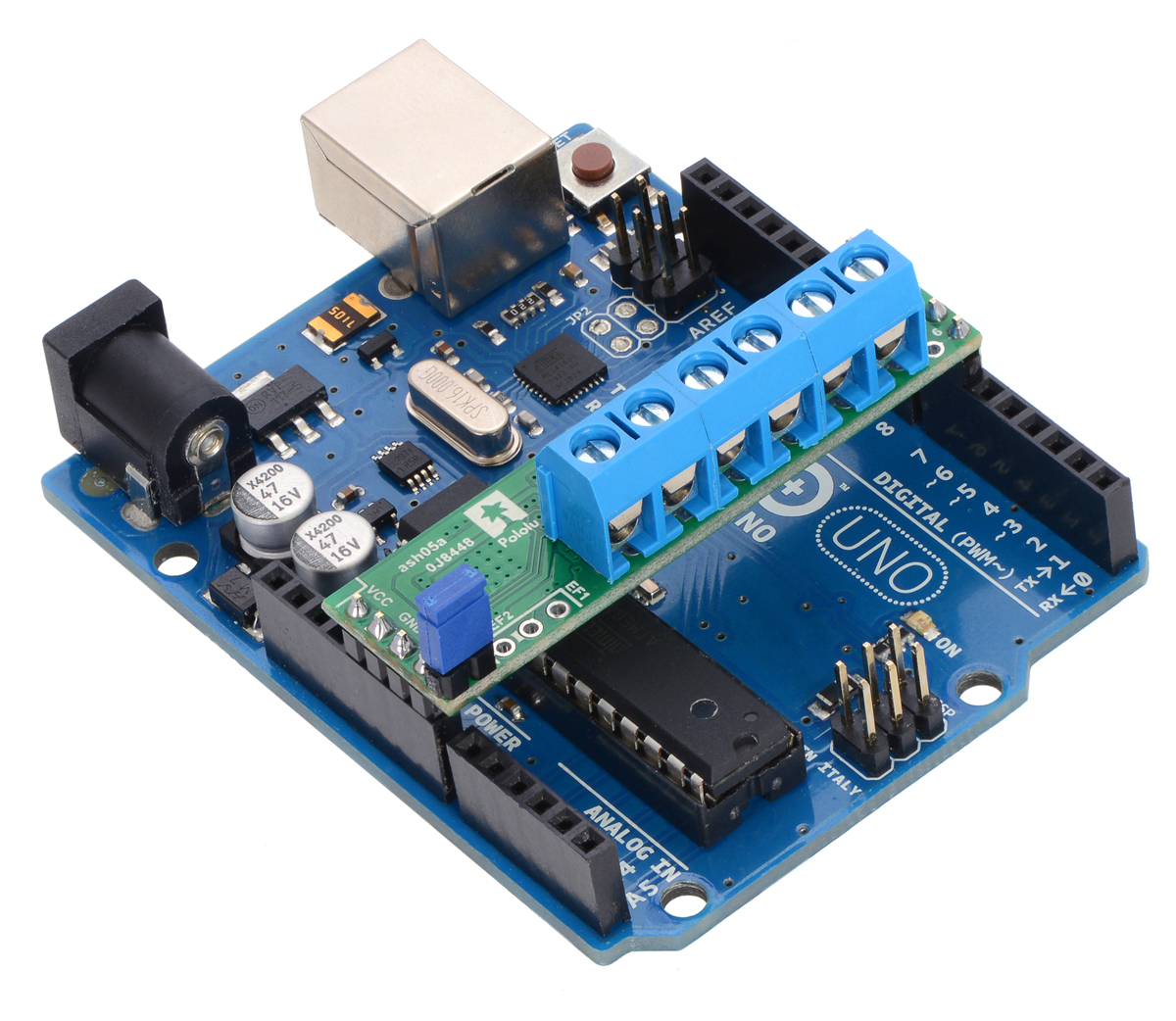
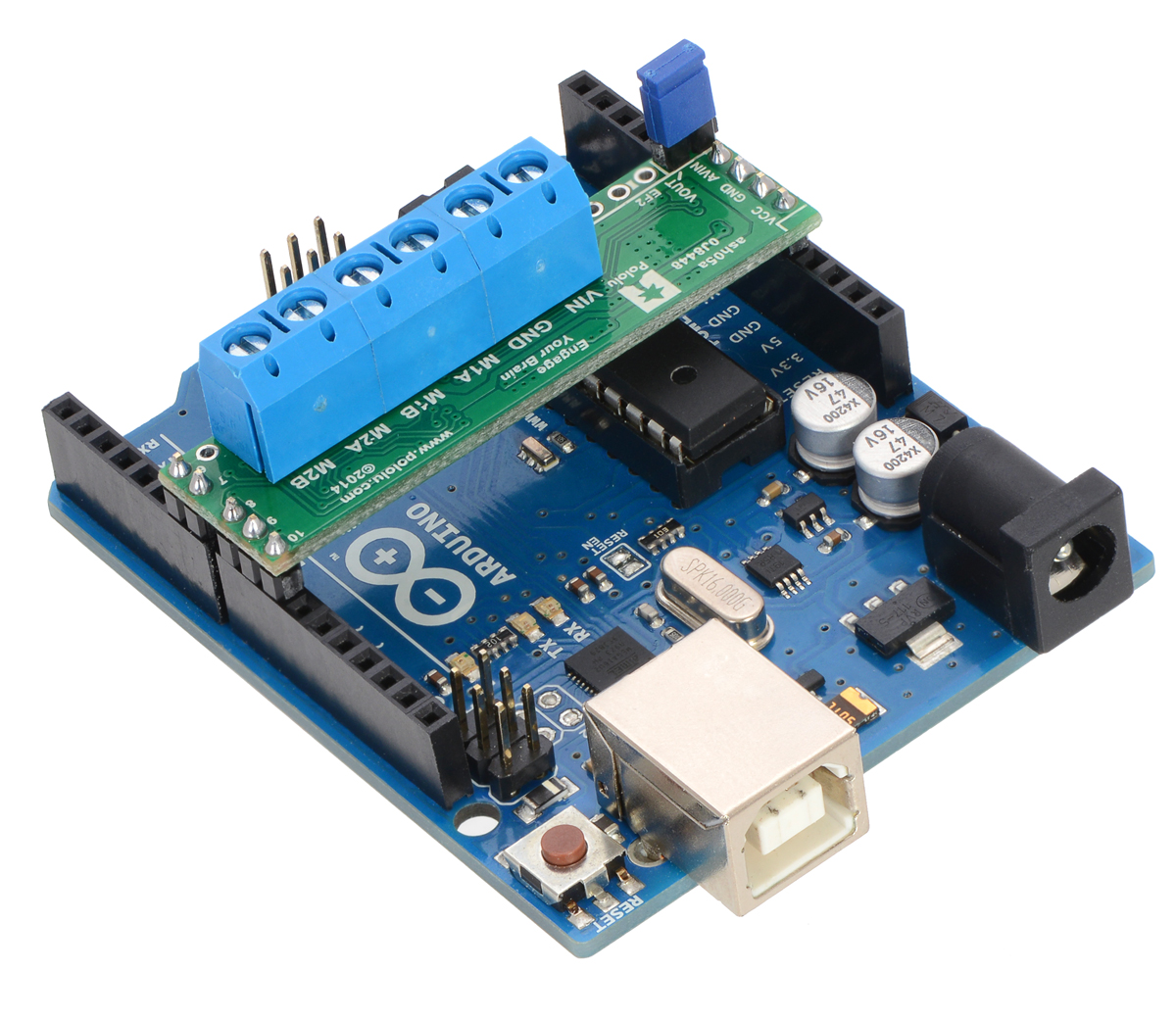
Arduino'yu kalkan üzerinden çalıştırma seçeneğini istiyorsanız, kartın sol alt köşesine iki erkek başlık pimi lehimleyebilirsiniz (serigrafi kutusunda "VOUT" olarak etiketlenmiştir). Bu pimler Arduino'dan uzağa, yukarı bakmalıdır. Daha sonra, verilen mavi kısa devre bloğunu bu pimlerin üzerine yerleştirirseniz (yukarıdaki monte edilmiş resimde gösterildiği gibi), ters korumalı kalkan gücü Arduino'yu VIN pimi üzerinden çalıştıracaktır. Bu konuda daha fazla bilgi için aşağıdaki Kalkanı kullanma bölümüne bakın, bazı önemli uyarılar da dahil.
Üç adet 2 pimli, 5 mm terminal bloğu, kaydırılıp altı büyük deliğe lehimlendikten sonra kalkanla kolay motor ve güç bağlantıları yapmak için dahil edilmiştir. Alternatif olarak, terminal bloğu deliklerinin üzerindeki daha küçük deliklere 0,1 inç erkek başlık pimleri lehimleyebilir veya kabloları doğrudan kalkanın üzerine lehimleyebilirsiniz.
Arduino dahil değildir .
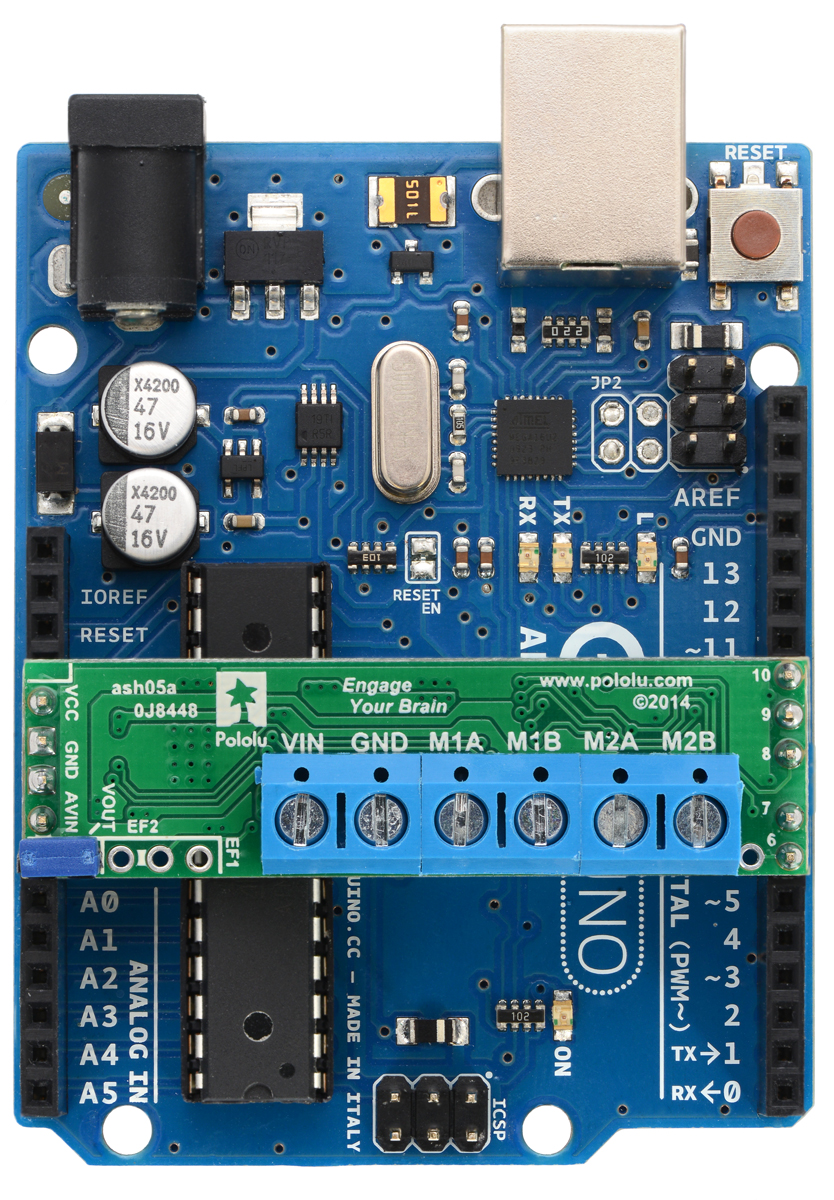
Kalkan bir tarafta Arduino dijital pinleri 6, 7, 8, 9 ve 10'a, diğer tarafta Arduino VIN, GND, GND ve 5V/VCC'ye takılır. Kalkanın sol üst köşesi Arduino'nun 3.3V pinini kısmen engeller, ancak erişime izin vermek için kartın bu bölgesi (beyaz bir serigrafi kutusu ile işaretlenmiştir) gerekirse çıkarılabilir.
Kalkanın varsayılan durumunda, motor sürücü kalkanı ve Arduino ayrı ayrı güç alır, ancak ortak bir toprak paylaşırlar ve Arduino'nun 5V rayı kalkanın mantık kaynağı olarak hizmet eder. Bu şekilde kullanıldığında, Arduino'ya USB, güç jakı veya VIN pini üzerinden güç verilmelidir ve kalkan büyük VIN ve GND pedleri aracılığıyla 6 V ila 32 V ile beslenmelidir. Kalkanı Arduino'dan çalıştırmaya çalışmak önerilmez, çünkü bu küçük izlerden büyük akımların akmasına neden olabilir. Ancak, motor güç kaynağı uygunsa, Arduino'yu kalkandan çalıştırmak mümkündür. Bu, VOUT ve AVIN etiketli kalkan pinleri arasına, ters korumalı motor besleme voltajını Arduino'nun VIN pinine bağlayarak Arduino'ya güç veren bir jumper yerleştirilerek gerçekleştirilebilir. Arduino'nun güç jakı bu yapılandırmada her zaman bağlantısız kalmalıdır.
Uyarı : Arduino'yu motor kalkanından çalıştırırken, Arduino'nun VIN pinine asla farklı bir güç kaynağı bağlamamalı veya Arduino'nun güç jakına bir güç kaynağı takmamalısınız, çünkü bunu yapmak kalkanın güç kaynağı ile Arduino'nun güç kaynağı arasında hem Arduino'ya hem de motor kalkanına kalıcı olarak zarar verebilecek bir kısa devreye neden olur. Bu durumda, kalkan güç kaynağınızın Arduino'nuz için kabul edilebilir bir voltajda olması da önemlidir, bu nedenle 6 V ila 32 V arasındaki tam kalkan çalışma voltajı aralığı muhtemelen mevcut olmayacaktır. Örneğin, Arduino Uno'nun önerilen çalışma voltajı 7 – 12 V'tur.
Kalkan, gerekli PWM sinyallerinin sayısını azaltarak A4990'ın kontrol arayüzünü basitleştiren entegre mantık kapılarına sahiptir. Her kanalın bir hız kontrol girişi, MxPWM ve bir yön kontrol girişi, MxDIR vardır. Arduino pinleri 9 ve 7 sırasıyla motor 1'in hızını ve yönünü kontrol etmek için kullanılır ve pinler 10 ve 8 motor 2'nin hızını ve yönünü kontrol eder. Aşağıdaki doğruluk tablosu kalkanın nasıl çalıştığını gösterir:
| MxDİZİN | MxPWM | MxA | MxB | çalışma modu |
|---|---|---|---|---|
| 0 | PWM | PWM | L | ileri/hızda fren PWM % |
| 1 | PWM | L | PWM | geri/fren hızında PWM % |
| X | 0 | L | L | fren düşük (çıkışlar toprağa kısa devre) |
A4990, sürücünün durumu hakkında geri bildirim sağlayan iki tanılama pimine sahiptir, EF1 ve EF2. Bu pimler, arızaları belirtmek için çip tarafından düşük sürülen açık drenaj çıkışlarıdır (veri sayfası, EF1 ve EF2'nin her bir kombinasyonunun ne anlama geldiğini açıklar). Aksi takdirde, bu pimler yüzer durumda kalır. Varsayılan olarak, EF2, 1 kΩ koruma direnci aracılığıyla Arduino dijital pim 6'ya bağlanır; pim 6, dahili çekme özelliği etkinleştirilmiş bir giriş olarak yapılandırıldığında, düşük bir sinyal aşırı akım, aşırı voltaj veya aşırı sıcaklık durumunu gösterir.
EF1 ve EF2 pinlerine genellikle kartın sol alt köşesindeki 3 pinli geçiş deliği sırası üzerinden erişilebilir. Motor sürücü arıza işaretlerini izlemek istemiyorsanız veya pin 6'yı başka bir amaç için serbest bırakmak istiyorsanız, EF2 pinini kalkanın alt tarafındaki komşu (orta) pine bağlayan izi kesebilirsiniz.
A4990, sabit frekanslı PWM akım regülasyonu (akım kesme) kullanarak motorlardaki akımı aktif olarak sınırlayabilir. Bu taşıyıcı kart, akım algılama pinlerine 0,075 Ω dirençler bağlar ve bu da akım sınırını kanal başına nominal 1 A'ya ayarlar. Testlerimizde, kart aslında motor akımını 0,9 A'nın biraz üzerine sınırladı.
Sürücü motor akımını kanal başına yaklaşık 0,9 A ile sınırlasa bile, çip kendi başına daha düşük akımlarda aşırı ısınacaktır. Örneğin, zorlamalı hava akışı olmayan oda sıcaklığındaki testlerimizde çip, çipin termal koruması devreye girmeden önce yaklaşık 15 saniye boyunca kanal başına 0,9 A verebildi. Kanal başına 0,65 A'lik sürekli bir akım, termal kapanmayı tetiklemeden dakikalarca sürdürülebilirdi. Gerçekte sağlayabileceğiniz akım, motor sürücüsünü ne kadar iyi serin tutabildiğinize bağlı olacaktır. Testlerimiz %100 görev döngüsünde gerçekleştirildi; girişlerin PWM'lenmesi, frekansla orantılı olarak ek ısınmaya neden olacaktır (A4990 akımı sınırlamak için çıkışların PWM'sini zaten yapmıyorsa).
Bu ürün, çip aşırı ısınmadan çok önce sizi yakacak kadar ısınabilir. Bu ürünü ve ona bağlı diğer bileşenleri kullanırken dikkatli olun .